硬件面试
solidity
BitmapDrawable
搭建网站
devops
桥接模式
SAP ABAP
dreamweaver
超级电容
博通蓝牙使能
遥感预处理
PDF合并与拆分
GcPDF
热成像仪
区别
photoshop
前沿技术
OpenHarmony
环境搭建
回退回滚版本
控制器
2024/4/12 1:33:15
最简单DIY基于ESP8266的国产WS2812智能彩灯④(在网页用按钮点亮)
ESP8266和ESP32智能彩灯开发系列文章目录
第一篇:最简单DIY基于ESP8266的智能彩灯①(在网页用按钮点亮普通RGB灯) 第二篇:最简单DIY基于ESP8266的智能彩灯②(在网页用按键和滑动条控制RGB灯) 第三篇&#…

【计组笔记03】计算机组成原理之系统五大部件介绍、主存模型和CPU结构介绍
这篇文章,主要介绍计算机组成原理之系统五大部件、主存模型和CPU结构。 目录
一、计算机五大部件
1.1、体系结构
(1)冯诺依曼体系结构


滑模控制简单理解(hm-1)
变结构控制(VSC)是一种特殊的非线性控制器,表现为控制的不连续性,又称滑模控制(SMC)。一般步骤为滑模面的设计、趋近率的设计、控制器的求解。 滑模控制的理解
如图所示,s是滑模面,…

最简单DIY基于蓝牙、51单片机和舵机的钢铁爱国者机关枪控制器
51单片机物联网智能小车系列文章目录 第一篇:最简单DIY的51蓝牙遥控小车设计方案 第二篇:最简单DIY串口蓝牙硬件实现方案 第三篇:最简单DIY蓝牙PS2遥控器控制蓝牙智能小车 第四篇:最简单DIY基于51单片机的舵机控制器 第五篇&#…

最简单DIY基于STM32单片机的WIFI智能小车设计方案
STM32库函数开发系列文章目录
第一篇:STM32F103ZET6单片机双串口互发程序设计与实现 第二篇:最简单DIY基于STM32单片机的蓝牙智能小车设计方案 第三篇:最简单DIY基于STM32F407探索者开发板的MPU6050陀螺仪姿态控制舵机程序 第四篇࿱…


【计算机组成原理】Yy-z02模型机的硬布线控制器设计
目录
一、Yy-z02模型机的系统结构
二、Yy-z02模型机的数据通路
三、Yy-z02模型机的指令执行 四、Yy-z02模型机的硬布线控制器 一、Yy-z02模型机的系统结构
指令系统的实现 <--- 构造它的硬件系统 硬件系统构造过程:
分析指令格式和各指令的功能确定部件连…

STM32输出一定个数占空比可调的单脉冲信号
软件环境:Keil5
硬件环境:STM32F103C8T6
最近有个项目需要用到STM32F0产生一定数量不同占空比的单脉冲信号,初步构思了一下。以前配置一些传感器即根据时序图写脉冲序列就是用简单的延时模拟单个脉冲信号,这种方法在工程项目中太…

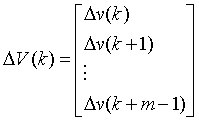
计算机控制系统信号恢复之零阶保持器
零阶保持器
在计算机控制系统中,由于CPU只能处理数字信号,而被控对象等过程往往是连续过程,因此计算机控制系统是一个混合系统,包含数字信号、模拟信号、离散模拟信号。而在数字信号通过DA转换为模拟信号的时候,样本点…
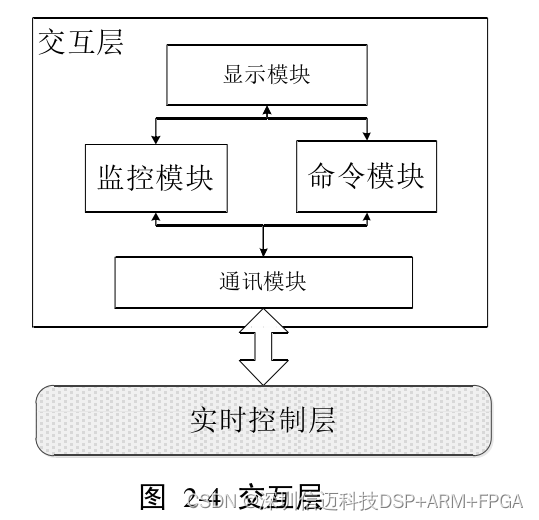
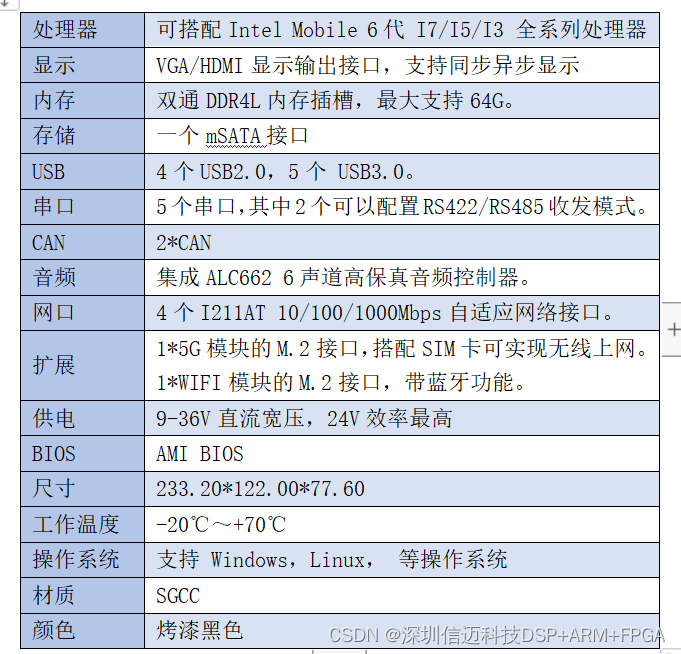
基于ZYNQ的移动机器人控制器设计(一)
移动机器人的设计是一个集软件、硬件、机械知识于一体的工作,因此,一套完整 方案的提出,则要展示其在机械结构、硬件架构、软件层次上的关键技术。
2.1应用场景描述和需求分析 本节首先对论文提出的移动机器人控制器方案的应用场景进行描述…
《使用ThinkPHP6开发项目》 - 创建控制器
《使用ThinkPHP6开发项目》 - 安装ThinkPHP框架-CSDN博客
《使用ThinkPHP6开发项目》 - 设置项目环境变量-CSDN博客
《使用ThinkPHP6开发项目》 - 项目使用多应用开发-CSDN博客
《使用ThinkPHP6开发项目》 - 创建应用-CSDN博客
使用ThinkPHP6创建控制器,开始项…
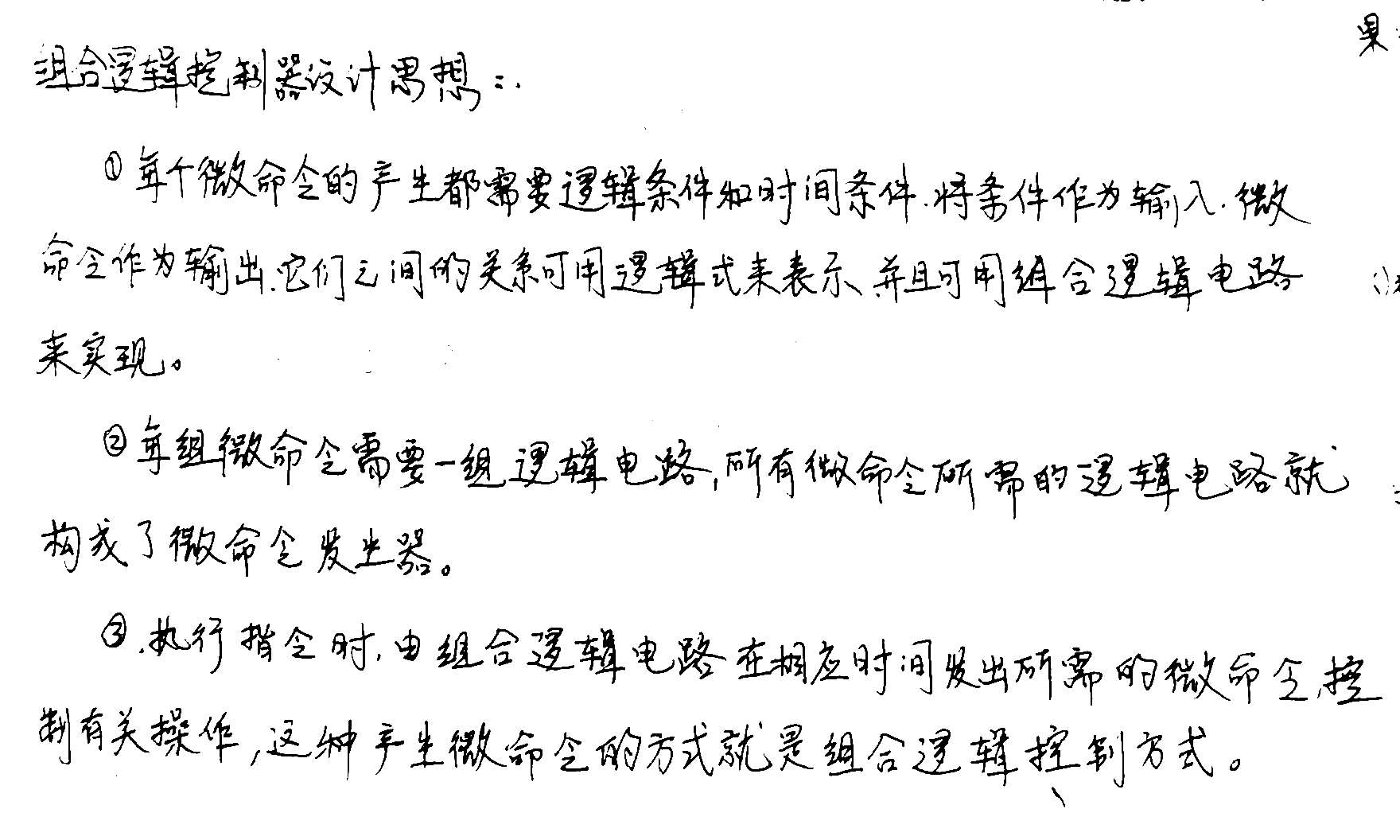
微程序控制器、组合逻辑控制器设计思想
计算机组成原理微程序控制器设计思想组合逻辑控制器设计思想微程序控制器设计思想
组合逻辑控制器设计思想
微程序控制器设计思想 组合逻辑控制器设计思想

【K8S基础】-k8s的核心概念控制器和调度器
Kubernetes是一个开源的容器编排平台,旨在简化和自动化容器化应用程序的部署、扩展和管理。它提供了一个强大的基础设施来管理容器化应用程序的生命周期,并确保它们在整个集群中高效运行。 Kubernetes的核心概念包括集群、节点、Pod、控制器、调度器等。…

串级PID构建物理模型分析
前言
临近电赛,再次复习一下PID。 由于电赛给的控制系统较为复杂,所以这次是以串级PID物理模型分析为主。 毕竟只有建立了对应系统的PID模型才能更好的去设计代码和调节参数。
至于代码。。大概明天会写个PID的库。。。。大概吧(咕咕咕 &am…

自动控制原理分析工作原理以及方框图做题过程
自动控制原理分析工作原理以及方框图个人笔记
本文目的
学会看图分析自控系统工作原理并画出方框图
先摆题 控制系统的组成
要能分析自控系统,得先知道自控系统的组成 测量反馈元件——用以测量被控量并将其转换成与输入量同一物理量后,再反馈到输入…

AngularJS精妙绝伦的控制器
为什么使用控制器? 控制器就像领域模型和视图的纽带,它从模型中暴露数据给视图,它给视图提供数据与服务,并且定义了所需的业务逻辑,从而将用户行为转换为模型上的变化。 一.理解基本原理 控制器是通过NG的Module.cont…

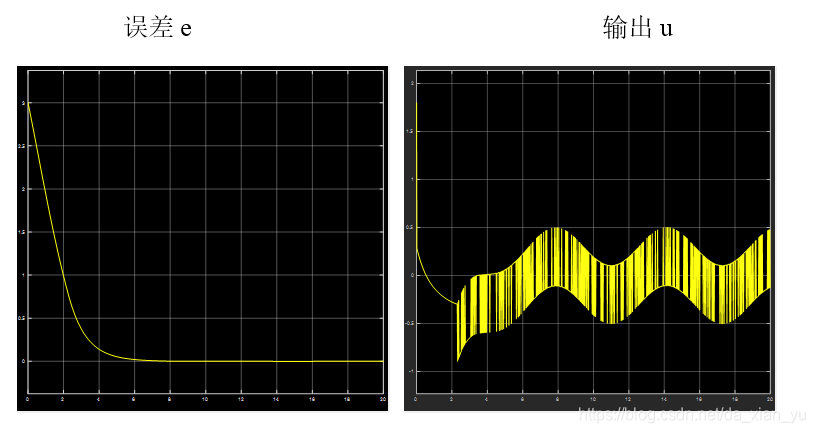
滑模控制几种趋近率的对比(hm-2)
我们以最简单的牛顿第二定律作为被控对象来进行几种趋近率的对比。 滑模面设计为: e(t)为期望位置和实际位置的差,则有: 分别采用等速趋近率、指数趋近率以及幂次趋近率: 代入得到: 在指数趋近中,趋近速度从较大值逐步…
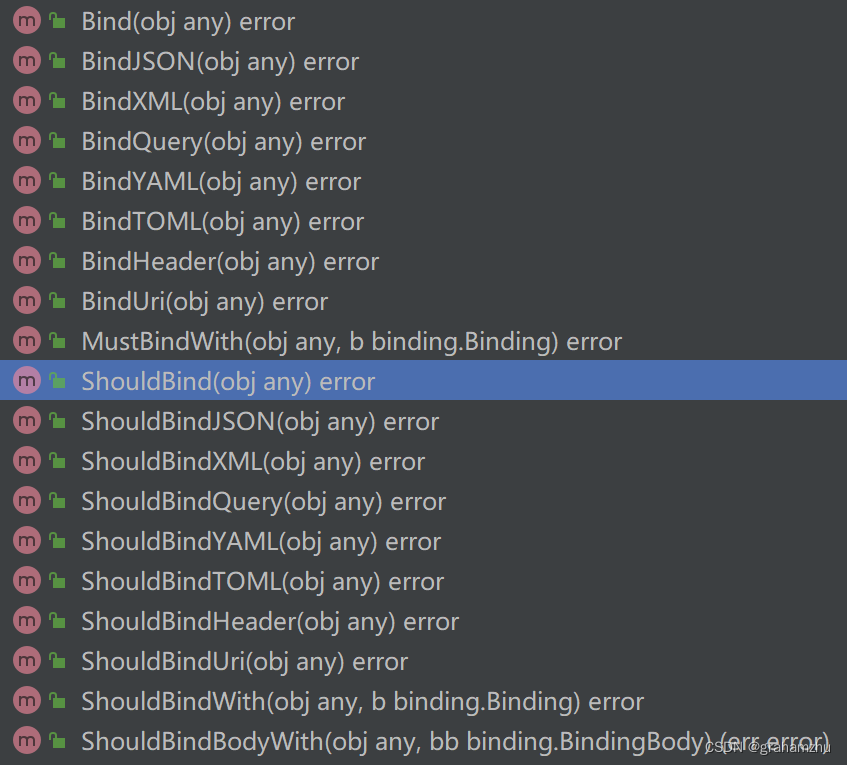
golang语言系列:Web框架+路由 之 Gin
云原生学习路线导航页(持续更新中) 本文是golang语言学习系列,本篇对Gin框架的基本使用方法进行学习 1.Gin框架是什么
Gin 是一个 Go (Golang) 编写的轻量级 http web 框架,运行速度非常快,如果你是性能和高效的追求者…
滑模鲁棒控制(hm-3)
考虑如下被控对象: 滑模面设计为: e(t)为期望位置和实际位置的差,则有: 根据上一节所讲的几种趋近率,我们采用指数趋近率: 代入得到: 由于干扰d(t)未知,上述控制律无法实现。为了解决这一问题,采用干扰的界…

stm32中的DMA你搞懂了吗!!!
一. 对于大容量的STM32芯片有2个DMA控制器,控制器1有7个通道,控制器2有5个通道
每个通道都可以配置一些外设的地址。 二. 通道的配置过程: 1. 首先设置CPARx寄存器和CMARx寄存器。
通过DMA控制器把一个地址的值复制到另外一个地…
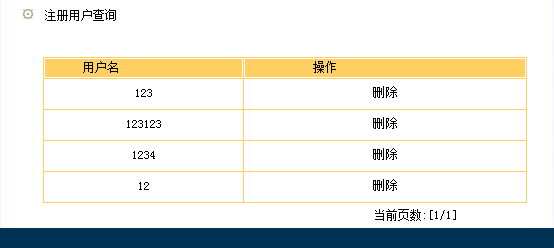
基于JSP实现的影视创作论坛系统
源码下载 http://www.byamd.xyz/hui-zong-1/摘 要
随着时代的发展,互联网的出现,给传统影视行业带来的最大便利就是,方便了影视从业人员以及爱好者的交流和互动,而为用户提供一个书写影评,阅读影评以及回复影评的平台…

最简单DIY基于STM32F407探索者开发板和PCA9685舵机控制模块的红外遥控机械臂控制程序
STM32库函数开发系列文章目录
第一篇:STM32F103ZET6单片机双串口互发程序设计与实现 第二篇:最简单DIY基于STM32单片机的蓝牙智能小车设计方案 第三篇:最简单DIY基于STM32F407探索者开发板的MPU6050陀螺仪姿态控制舵机程序 第四篇࿱…

最简单DIY基于ESP8266的智能彩灯①(在网页用按钮点亮普通RGB灯)
ESP8266和ESP32智能彩灯开发系列文章目录
第一篇:最简单DIY基于ESP8266的智能彩灯①(在网页用按钮点亮普通RGB灯) 文章目录ESP8266和ESP32智能彩灯开发系列文章目录前言一、最简单DIY基于ESP8266的智能彩灯①(在网页用按钮点亮普…

最简单DIY基于Android系统的万能蓝牙设备智能遥控器
51单片机物联网智能小车系列文章目录 第一篇:最简单DIY的51蓝牙遥控小车设计方案 第二篇:最简单DIY串口蓝牙硬件实现方案 第三篇:最简单DIY蓝牙PS2遥控器控制蓝牙智能小车 第四篇:最简单DIY基于51单片机的舵机控制器 第五篇&#…

最简单DIY的51蓝牙遥控小车设计方案
51单片机物联网智能小车系列文章目录 第一篇:最简单DIY的51蓝牙遥控小车设计方案 文章目录51单片机物联网智能小车系列文章目录前言一、最简单DIY的51蓝牙遥控小车设计方案是什么?二、制作步骤1.购买现成的小车配件2.下载代码3.根据软件和硬件完成硬件连…

最简单DIY基于STM32F407探索者开发板的MPU6050陀螺仪姿态控制舵机程序
STM32库函数开发系列文章目录
第一篇:STM32F103ZET6单片机双串口互发程序设计与实现 第二篇:最简单DIY基于STM32单片机的蓝牙智能小车设计方案 第三篇:最简单DIY基于STM32F407探索者开发板的MPU6050陀螺仪姿态控制舵机程序 文章目录STM32库函…

最简单DIY基于ESP8266的智能彩灯②(在网页用按键和滑动条控制RGB灯)
ESP8266和ESP32智能彩灯开发系列文章目录
第一篇:最简单DIY基于ESP8266的智能彩灯①(在网页用按钮点亮普通RGB灯) 第二篇:最简单DIY基于ESP8266的智能彩灯②(在网页用按键和滑动条控制RGB灯) 文章目录ESP8…

最简单DIY基于ESP8266的物联网智能小车②(webserver服务器网页高级遥控版)
ESP8266和ESP32物联网智能小车开发系列文章目录
第一篇:最简单DIY基于ESP8266的物联网智能小车①(webserver服务器网页简单遥控版) 第二篇:最简单DIY基于ESP8266的物联网智能小车②(webserver服务器网页高级遥控版&am…

最简单DIY基于ESP8266的智能彩灯③(在网页用按钮+滑动条+手机APP控制RGB灯)
ESP8266和ESP32智能彩灯开发系列文章目录
第一篇:最简单DIY基于ESP8266的智能彩灯①(在网页用按钮点亮普通RGB灯) 第二篇:最简单DIY基于ESP8266的智能彩灯②(在网页用按键和滑动条控制RGB灯) 第三篇&#…

Cocos Creator 3D 摇杆控制器一种简单实现!
一个控制移动和视角的遥感控制器3D示例项目。效果原理在贪吃蛇大作战!蛇移动的思考与实现!中使用到一个摇杆控制器,不过这是在2D层面上,这次把它改到3D上。摇杆摇杆的原理大致是把触摸点的位置传给需要的组件。(参考KUOKUO的摇杆组件改的)监听…
SpringMVC 控制器向视图传值的方式
在SpringMVC中,控制器向视图传值一般有三中方式,分别是通过ModelAndView、ModelMap、Session,下面将讲述三种传值方式
ModelAndView
将控制器方法的返回值设为ModelAndView,并且向ModelAndView中添加数据,在视图的re…

EHCI主机控制器--端口路由逻辑和控制
一个USB 2.0主机控制器由一个高速主机控制器组成,它实现了EHCI编程接口和0到N个USB 1.1伴侣主机控制器。伴随主机控制器(chc)可以是通用或开放主机控制器规范的实现。此配置用于提供所需的完全USB 2.0定义的端口能力;例如,每个端口的低,全&am…
k8s 中的 deployment,statefulset,daemonset 控制器的区别
参考:
k8s 说一下deployment,statefulset,daemonset 的区别 原创 Deployment、StatefulSet、DaemonSet的区别Deployment和Statefulset区别StatefulSet 和 Deployment 区别及选择方式
先介绍下k8s中,三种常见的控制器类型&#x…

ThinkPHP 5 命令行执行控制器方法!
平时在开发的时候为了方便定时任务执行某些方法,我们可以通过tp的自定义命令行来实现
首先创建一个 application/common/command/Action.php
<?php
/*** Created by PhpStorm.* User: Administrator* Date: 2019/12/23* Time: 12:35*/namespace app\common\c…
【计算机组成原理】Yy-z02硬布线模型机设计
目录
一、Yy-z02模型机的系统结构
二、Yy-z02模型机的数据通路
三、Yy-z02模型机的指令执行 四、Yy-z02模型机的硬布线控制器 一、Yy-z02模型机的系统结构
指令系统的实现 <--- 构造它的硬件系统 硬件系统构造过程:
分析指令格式和各指令的功能确定部件连…
自动驾驶规划控制软硬一体化控制器解决方案(一)
随着社会的进步,汽车工业和电子科技发展迅速,车载电子器件的数量越来越多,汽车 电子的平台集成度越来越高,两者的融合正在革新着人们的驾乘体验。本文基于 x86 SoC 进 行系统设计,实现高效的汽车智能驾驶舱技术和高级驾…
爱了!Alibaba内部出品“K8S+Docker指南”,理论与实战双管齐下
有幸从一位朋友那里得到Alibaba内部出品强推的“K8SDocker学习指南”,秉承好东西的当然要共享的原则,今天就来秀一把,试试这“K8SDocker学习指南”是否也能让你事半功倍!
K8S:深入浅出Kubernetes(理论实战…

一文读懂舵机工作原理并运用(附代码)
杂谈
自己拿到这一模块是也挺迷茫的,后来看了一些资料,也渐渐积累了些自己的理解,很多博文并没有将舵机讲明白,至少你待把PWM与角度如何换算讲清楚吧,所以笔者写这篇博文供大家学习掌握。
如果你拿到一个舵机&#x…

理解注解@ControllerAdvice
理解注解ControllerAdviceSpring框架提供了ControllerAdvice注解,帮助你将其应用到所有的控制器上。
Controller Advice字面上意思是“控制器通知”,Advice除了“劝告”、“意见”之外,还有“通知”的意思。你可以将ModelAttribute和Excepti…

电机控制-速度环设计
参考
InstaSPIN-FOC™ 和 InstaSPIN-MOTION™用户指南b站: 豪底狄:《PID调节器》第一部分:电流环设计 参考TI文档,花了点时间,把速度环控制器的设计梳理了一下。我把一些关键的地方做了补充,做了介绍。整个下来应该会…
(译)云原生安全白皮书
执行摘要目的云原生的开发和部署模式已经成为业界趋势,技术、产品、标准和解决方案的生态系统也在同步的扩张之中,决策者面临着跟进复杂设计的挑战。CISO 要在这个动荡的战场中实践业务价值,这个角色显得尤为重要。云原生模式鼓励消费模式的变…

23 种设计模式的通俗解释,虽然有点污,但是秒懂
点击上方蓝色字体,选择“设置星标”优质文章,第一时间送达来源 | zhuanlan.zhihu.com/p/10074672401 工厂方法追 MM 少不了请吃饭了,麦当劳的鸡翅和肯德基的鸡翅都是 MM 爱吃的东西,虽然口味有所不同,但不管你带 MM 去…